Samuel Ayankoso
Mechatronics & AI Researcher
AI-driven predictive maintenance, industrial robotics, and condition monitoring.

Biography
Samuel Ayankoso is a researcher at the University of Huddersfield. His current research focuses on machine learning-based condition monitoring for industrial collaborative robots, aiming to facilitate early fault and anomaly detection. Prior to this, he earned his master's degree in Robotics, Control, and Smart Systems at the American University in Cairo (AUC). There, he worked in data-driven modelling and control of a two-link flexible robot. His academic journey began with a bachelor's degree in mechanical engineering from the University of Ibadan, where he specialized in Engineering Design and graduated with first-class honours, ranking among the top three in my class. He has benefited from many scholarships in the past, among them are Commonwealth PhD scholarship, African Graduate Fellowship by AUC, MTN Foundation Scholarship, etc. His research interests encompass robotics, smart design, machine condition monitoring, predictive maintenance, data-driven modelling, modern and intelligent control, IoT, innovation, and entrepreneurship.
Get in Touch
Teaching & Supervision
Courses Taught
- Dynamic systems
- Automatic control
- Robotics
- Engineering communication: CAD
- Smart Maintenance
Publications
Key publications in leading international journals and conferences.
Selected Journal Publications
- Ayankoso S, Dutta A, He Y, Gu F, Ball A, Pal SK. Performance of vibration and current signals in the fault diagnosis of induction motors using deep learning and machine learning techniques. Structural Health Monitoring. 2024;0(0). https://doi.org/10.1177/14759217241289874
- Ayankoso S, Gu F, Louadah H, Fahham H, Ball A. Artificial-Intelligence-Based Condition Monitoring of Industrial Collaborative Robots: Detecting Anomalies and Adapting to Trajectory Changes. Machines. 2024; 12(9):630. https://doi.org/10.3390/machines12090630
- Ayankoso S, Wang Z, Shi D, Yang W, Vikiru A, Kamau S, Muchiri H, Gu F. (2024). Development of Long-Range, Low-Powered and Smart IoT Device for Detecting Illegal Logging in Forests. Journal of Dynamics, Monitoring and Diagnostics, 3(3), 190–198. https://doi.org/10.37965/jdmd.2024.550
- Ayankoso S, Olejnik P. Time-Series Machine Learning Techniques for Modeling and Identification of Mechatronic Systems with Friction: A Review and Real Application. Electronics. 2023; 12(17):3669. https://doi.org/10.3390/electronics12173669
- Olejnik, P., Ayankoso, S. Friction modelling and the use of a physics-informed neural network for estimating frictional torque characteristics. Meccanica 58, 1885–1908 (2023). https://doi.org/10.1007/s11012-023-01716-8
Selected Conference Publications
- Samuel Ayankoso,Eric Kaigom, Hassna Louadah, Hamidreza Faham, Fengshou Gu, and Andrew Ball. 2024. A Hybrid Digital Twin Scheme for the Condition Monitoring of Industrial Collaborative Robots. Procedia Comput. Sci. 232, C (2024), 1099–1108. https://doi.org/10.1016/j.procs.2024.01.108
- Ayankoso, S., He, Y., Gu, F., Ball, A. (2024). Multisensory Data-Based Fault Diagnosis of Induction Motors Using 1D and 2D Convolutional Neural Networks. In: Ball, A.D., Ouyang, H., Sinha, J.K., Wang, Z. (eds) Proceedings of the UNIfied Conference of DAMAS, IncoME and TEPEN Conferences (UNIfied 2023). TEPEN IncoME-V DAMAS 2023 2023 2023. Mechanisms and Machine Science, vol 152. Springer, Cham. https://doi.org/10.1007/978-3-031-49421-5_92
- Ayankoso, S., Liang, X., Louadah, H, Faham, H., Gu, F., Ball, A. (2024). Sensitivity of PCA and Autoencoder-Based Anomaly Detection for Industrial Collaborative Robots. In: Ball, A.D., Ouyang, H., Sinha, J.K., Wang, Z. (eds) Proceedings of the UNIfied Conference of DAMAS, IncoME and TEPEN Conferences (UNIfied 2023). TEPEN IncoME-V DAMAS 2023 2023 2023. Mechanisms and Machine Science, vol 152. Springer, Cham. https://doi.org/10.1007/978-3-031-49421-5_11
- M. K. Habib, S. A. Ayankoso and F. Nagata, "Data-Driven Modeling: Concept, Techniques, Challenges and a Case Study," 2021 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 2021, pp. 1000-1007. https://doi.org/10.1109/ICMA52036.2021.9512658
- M. K. Habib and S. A. Ayankoso, "Modeling and Control of a Double Inverted Pendulum using LQR with Parameter Optimization through GA and PSO," 2020 21st International Conference on Research and Education in Mechatronics (REM), Cracow, Poland, 2020, pp. 1-6. https://doi.org/10.1109/REM49740.2020.9313893
- M. K. Habib and S. A. Ayankoso, "Hybrid Control of a Double Linear Inverted Pendulum using LQR-Fuzzy and LQR-PID Controllers," 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, Guangxi, China, 2022, pp. 1784-1789. https://doi.org/10.1109/ICMA54519.2022.9856235
- S. A. Ayankoso and M. K. Habib, "Data-Driven Modeling of a Two-Link Flexible Manipulator (TLFM)," 2020 21st International Conference on Research and Education in Mechatronics (REM), Cracow, Poland, 2020, pp. 1-6. https://doi.org/10.1109/REM49740.2020.9313894
- S. A. Ayankoso and M. K. Habib, "Development of Data-Driven Model and Control Techniques for a Two-Link Flexible Manipulator (TLFM)," 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 2021, pp. 1-7. https://doi.org/10.1109/ISIE45552.2021.9576193
Grants & Awards
Recognition of research excellence and funding achievements.
Research Grants
- Climate Change AI Innovation Grant ($139,500) for a Project Titled Curbing Illegal Logging Patterns using Sound-Based Detection Techniques.
- Turing Scheme Grant, University of Huddersfield (2024).
- Conference Grant ($3000), The American University in Cairo (Fall 2020 and Spring 2021).
Awards & Scholarships
- PhD Scholarship, Commonwealth Scholarship Commission (2022-2025).
- Academic Honour Award, School of Science and Engineering, The American University in Cairo (2020).
- African Graduate Fellowship Awards, The American University in Cairo (Fall 2018 to Spring 2021).
- Dean's Honour List, Faculty of Technology, University of Ibadan (2015 and 2016)
- MTN Scholarship ($2000) for Outstanding Undergraduate Students in Nigeria (2014-2017)
- Best Graduating Student Award, Baptist Medical Center Secondary School (2011 set).
Research Projects
Current and recently completed research projects.
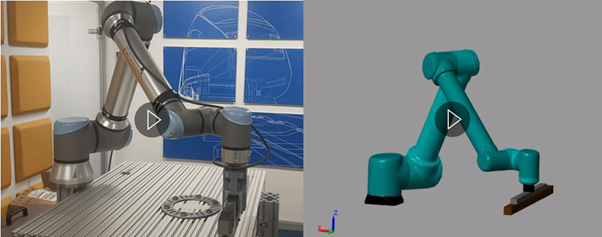
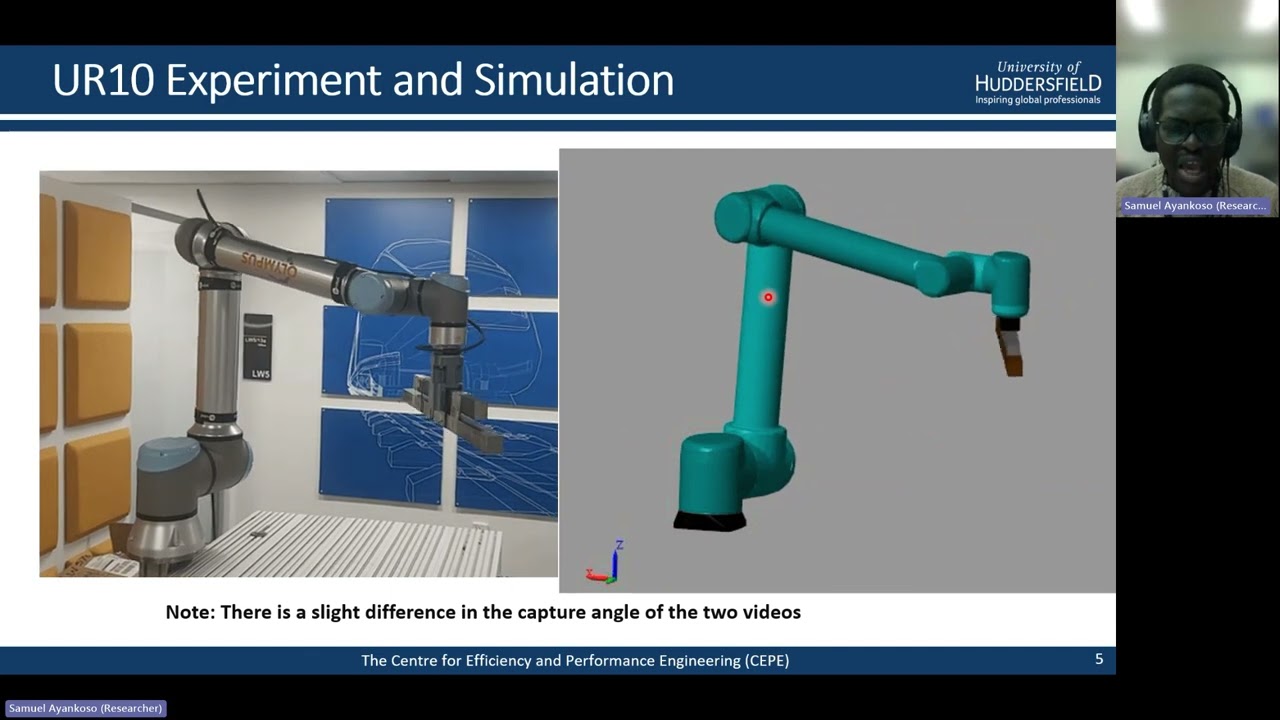
Cobot Digital Twin Design for Smart Maintenance
In this project, the digital twin of a UR10 robot was examined by integrating the CAD model of the robot, the dynamic model, and a PID controller in a simulation environment to see how this type of digital model can be helpful in smart maintenance applications.
This work was done as part of my PhD project
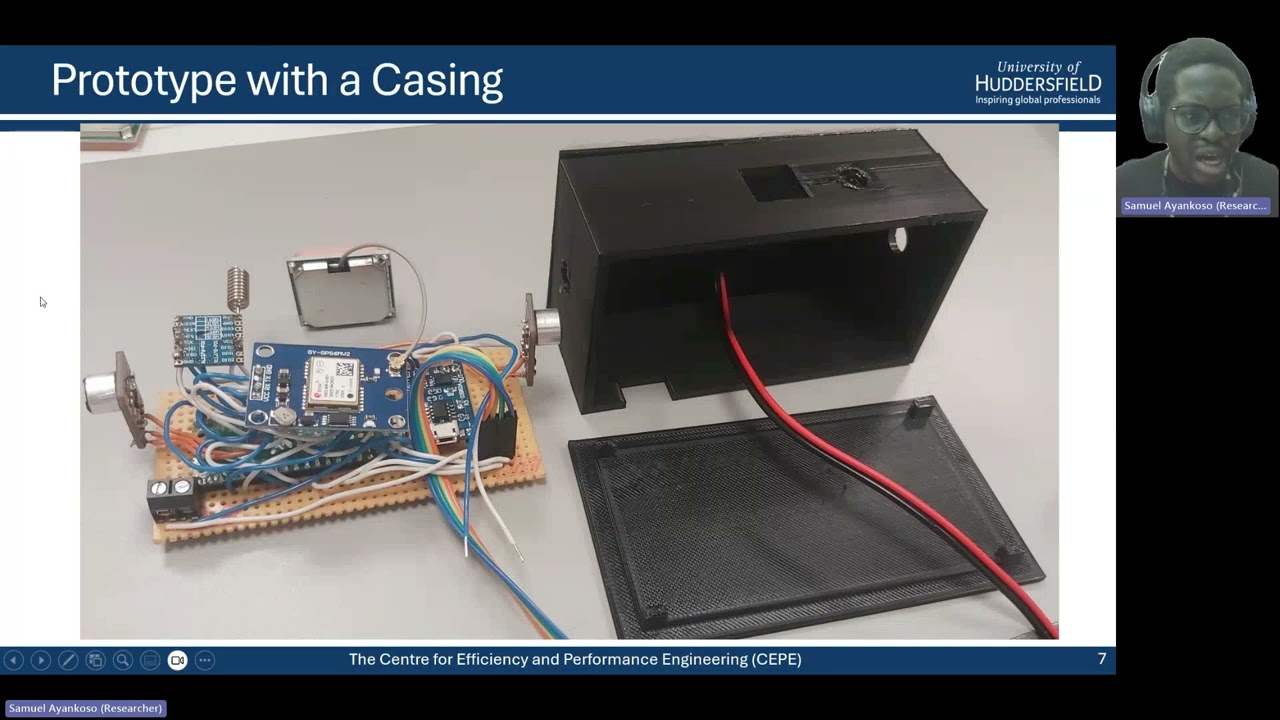
Design of development of IoT sensor node to prevent illegal logging
A smart, and low powered Internet of Things (IoT) node was developed which acquires sound with a microphone, preprocesses it and gives the class of the obtained data through a Tiny Machine Learning (TinyML) model. The developed node LoRa communication capability has been tested at several locations around Ngong Hill and the neighbouring forest called Oloolua in Kenya.
Read more about AI and the fight against illegal logging
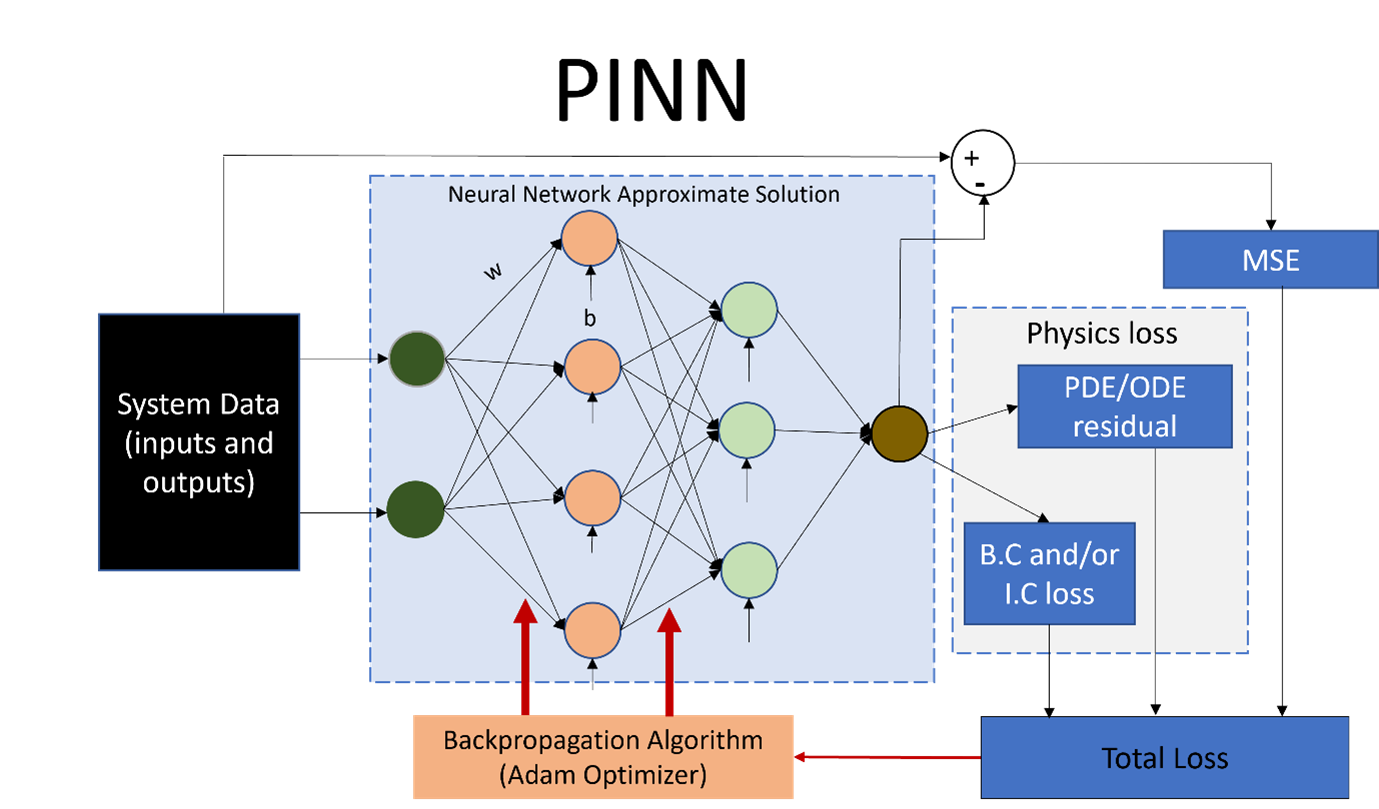
Physics-informed Neural Network modelling of a DC motor
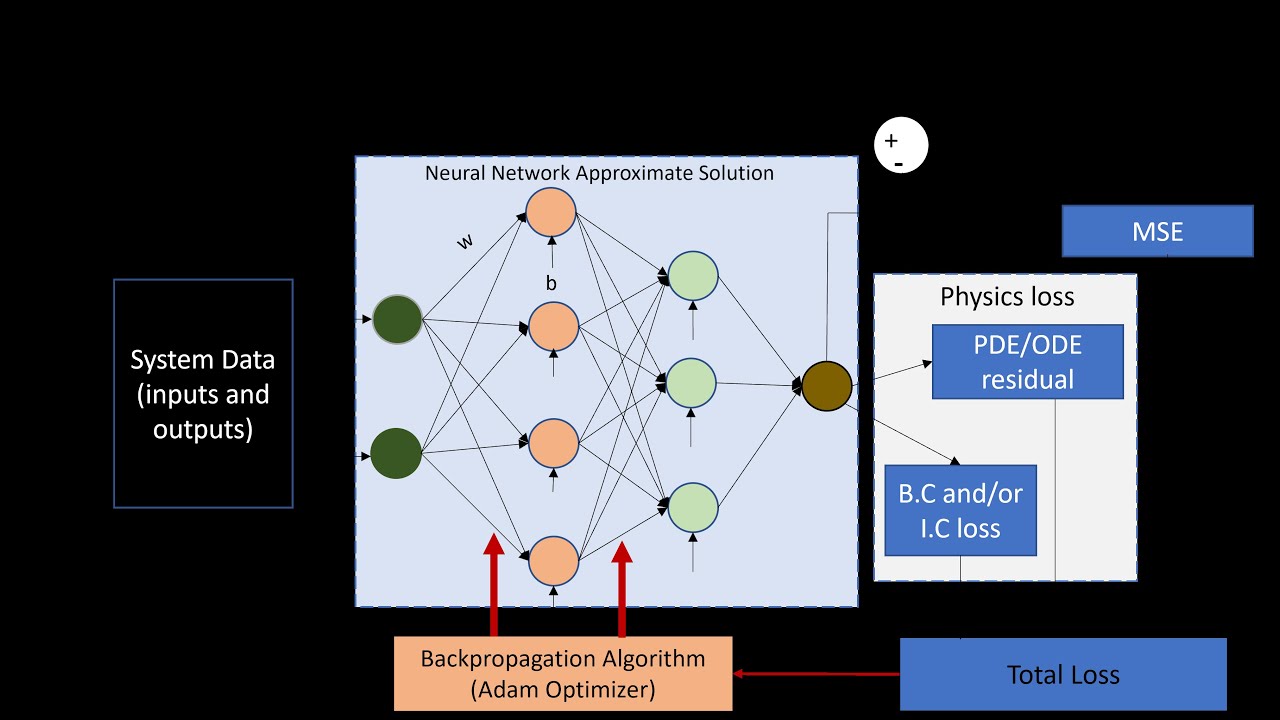
In this era of accelerated change through Artificial intelligence (AI), it is important to examine the application of different machine learning techniques like feedforward neural network and recurrent neural networks in the modelling of electromechanical systems such as a DC motor. This exactly was done in this project. In addition, due to the black-box nature of many machine learning models the application of Physics-informed Neural Networks (PINN) was investigated to bring interpretability to the resulting model and prevent overfitting. PINNs effectively combine data and physical laws to address supervised learning tasks.
Data-Driven Modelling and Control of Two-link Flexible Manipulator
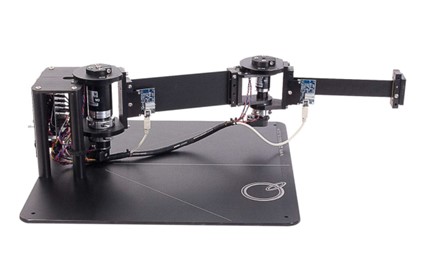
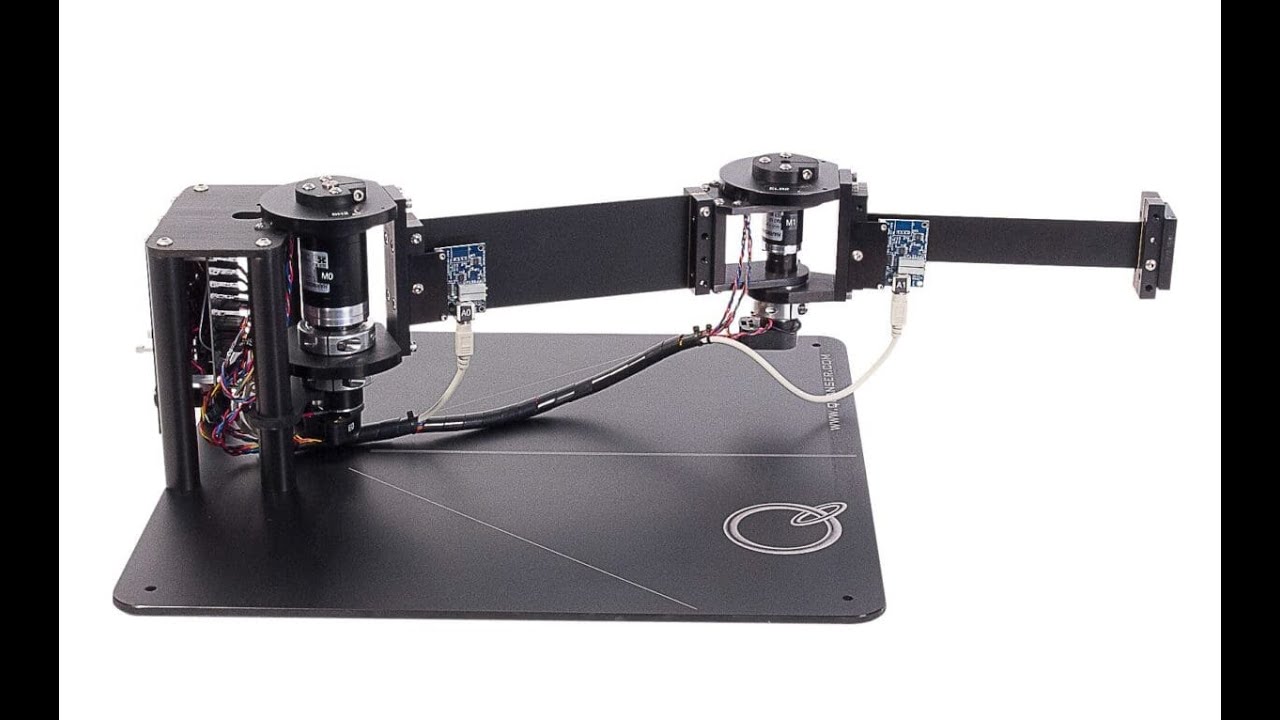
Two-link Flexible Manipulator (TLFM) has applications in space and medical fields and the data-driven modelling and control of this robot was examined in this project. This type of robot has two main control objectives: (1) accurate positioning/ trajectory and (2) vibration suppression. An accurate modelling is essential in systems control; hence, to prevent the simplifying assumptions with existing models (ie. unmodelled dynamics), a data-driven approach was employed to capture the underlying system behaviour under different operating conditions. The developed model was later used to design intelligent and robust controllers and deployed to Quanser TLFM; thus, meeting the control goals quickly and with less cost.
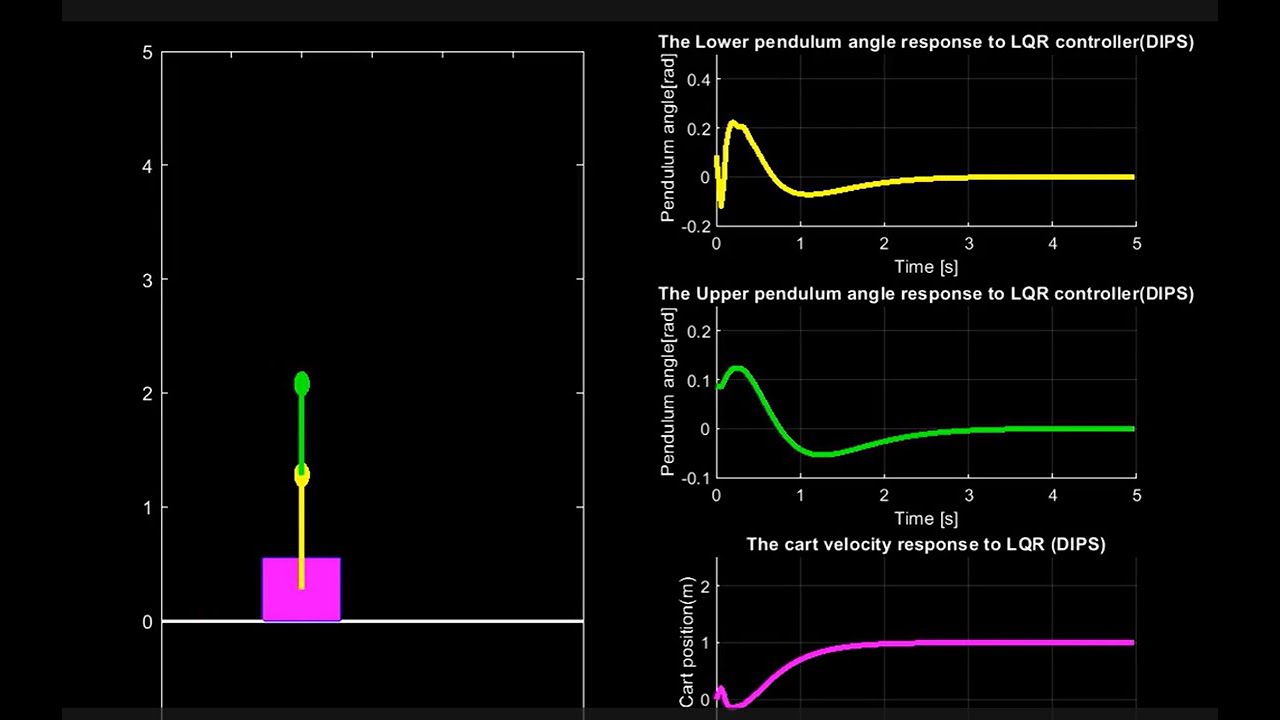
Double inverted pendulum Stabilization through LQR and Evolutionary Algorithms (GA and PSO)
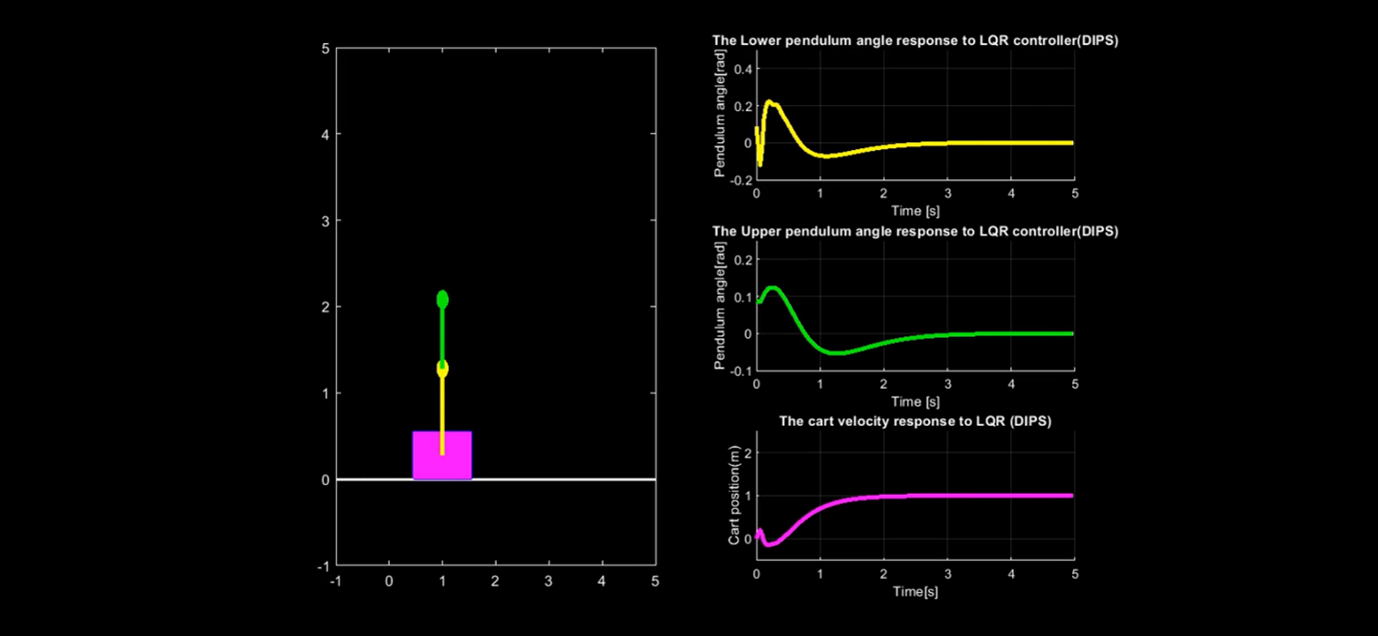
An inverted pendulum is a classical engineering system which is sometimes used as benchmark to test new control techniques. In this work, the mathematical modelling of a double inverted pendulum and its control was considered (simulation only). Besides, the use of genetic algorithm (GA) and particle swarm optimization (PSO) was introduced in optimizing the parameters of the LQR controller to ensure efficient stabilization and optimal control energy.
This work was done as part of my masters project
Visiting Positions
International academic appointments and collaborations.
Upcoming
Editorial Membership
Roles in academic journals and publications.
Upcoming
Professional Associations
Membership in professional bodies and organizations.